Harvardski tim je razvio rotaciono višematerijalno 3D-štampanje koje kombinuje aktivne tečne kristalne elastomere (LCE) i pasivne elastomere kako bi proizveo filamentne niti koje se programiraju da se savijaju, uvijaju, šire ili skupljaju pri zagrevanju. Filamenti su zadržali funkciju kroz najmanje 100 termalnih ciklusa, a aktivni i pasivni delovi ostaju čvrsto povezani zahvaljujući kovalentnim vezama. Metoda omogućava izradu arhitektura (rešetki) koje menjaju površinu i oblik — sa primenama u mekoj robotici, kontrolisanim filterima i biomedicinskim strukturama.
Revolucionarni 3D-štampani veštački mišići koji se savijaju i uvijaju po potrebi

Harvard engineers created 3D-printed artificial muscles that bend, twist, grip, and reshape when heated. (CREDIT: Lewis Lab / Harvard SEAS)
Harvardski tim razvio je novu metodu rotacionog višematerijalnog 3D-štampanja koja stvara filamentne niti sposobne da se programirano savijaju, uvijaju, šire ili skupljaju pri promeni temperature — praktično „veštačke mišiće“ ugrađene direktno u nit tokom štampe.
Kako funkcioniše
Pristup kombinuje dva meka materijala: aktivni tečni kristalni elastomer (LCE) koji se pri zagrevanju skuplja duž preferiranog unutrašnjeg smera, i pasivni elastomer koji zadržava oblik pri promeni temperature. Štampanjem ova dva materijala jedan pored drugog kroz rotirajuću mlaznicu istraživači precizno određuju raspored aktivnih i pasivnih regiona u preseku filamenta. Ta interna arhitektura kontroliše da li će nit da se savije, uvije ili formira heliks kada se aktivni deo skuplja, dok pasivni deo pruža otpor i definiše krivinu.
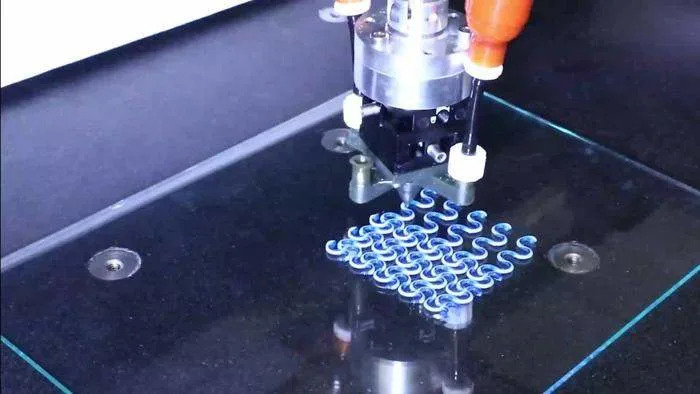
A lattice of active and passive filaments being printed via rotational multimaterial 3D printing. (CREDIT: Lewis Lab / Harvard SEAS)
Rotaciono višematerijalno štampanje
Rotacija mlaznice tokom ekstrudiranja nameće heliksno molekulsko poravnanje unutar filamenta. Bez rotacije dobijaju se tipične Janus strukture koje se savijaju; sa rotacijom se može upravljati prelazom od savijanja ka uvijanju i nazad, zavisno od heliksnog ugla. Brzina štampe i ugao rotacije omogućavaju fino podešavanje unutrašnjeg poravnanja i konačne deformacije.
Ključni rezultati i karakteristike
Eksperimentalno, čisti aktivni filamenti su se pri zagrevanju do 150 °C skratili na 0,67 ± 0,02 svoje početne dužine, dok su pasivni filamenti zadržali približno početnu veličinu od 1,03 ± 0,02. Elastični modul aktivnog materijala pri 25 °C bio je 29,67 ± 2,55 MPa naspram 0,57 ± 0,07 MPa za pasivni — razlika od oko 50× služi kao dodatna poluga za podešavanje zakrivljenosti.
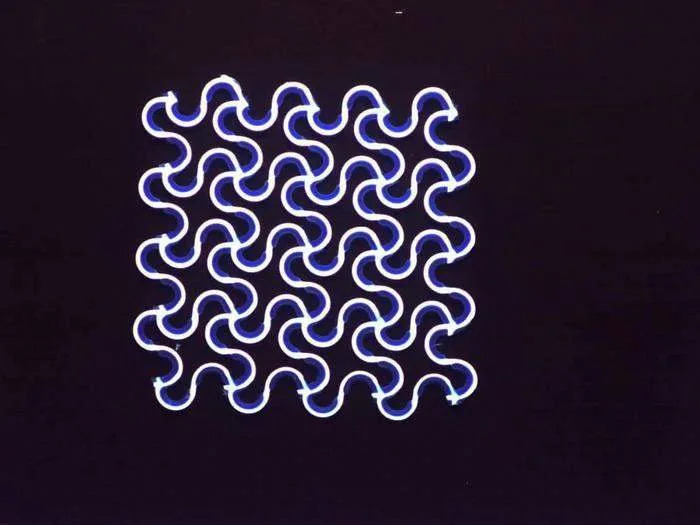
A 3D printed lattice made of active and passive filaments. (CREDIT: Lewis Lab / Harvard SEAS)
Kako je brzina štampe rasla od 0,25 do 3,0 mm/s, unutrašnje poravnanje LCE-a se pojačavalo, pa je maksimalna zakrivljenost porasla sa 0,13 ± 0,02 mm−1 na 0,59 ± 0,04 mm−1. Rotacija mlaznice je omogućila prelazak od savijanja do uvijanja i formiranja zbijenih heliksa u kompozitnim filamentima.
Izdržljivost i skala
Filamenti su zadržali visoku reverzibilnost kroz najmanje 100 termalnih ciklusa između 25 i 175 °C bez vidljive delaminacije ili klizanja između aktivnog i pasivnog dela — rezultat kovalentnih veza između akrilatnih tinte. Tim je već smanjio prečnike filamenta na oko 300 µm korišćenjem manjeg mlazničnog otvora, a procenjuju da bi daljim prilagođavanjem tinte i dizajna mlaznica mogli stići bliže 100 µm.
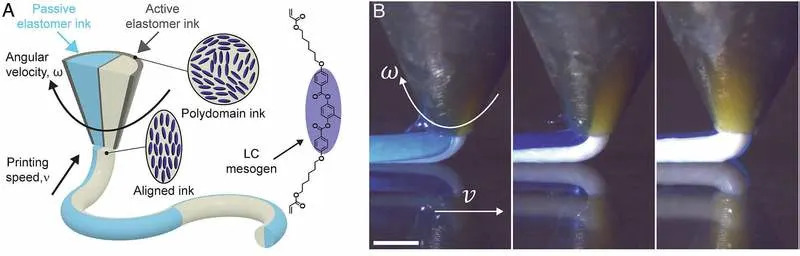
(A) Schematic of coextrusion of active and passive elastomer inks through a customized 1 mm-diameter nozzle. (B) Time-lapse images of ink coextrusion during rotational printing. (CREDIT: PNAS)
Arhitekture i primene
Jedna nit korišćena kao gradivni element omogućila je kreiranje rešetki koje se toplotom šire za oko 99 ± 11 % ili skupljaju za 28 ± 11 %, u zavisnosti od konfiguracije. Kombinovanjem kontrahujućih i širećih segmenata mogu se formirati listovi koji izlaze iz ravni u kupole (pozitivna Gaussova krivina) ili sedlast oblik (negativna krivina). Demonstrirane primene uključuju temperaturno kontrolisane filtere, multigrip hvataljke za pick-and-place zadatke i potencijalno implikacije u biomedicinskim, filtracionim i mekom robotikom.
Ko stoji iza rada
Rad vodi Jennifer Lewis sa Harvard John A. Paulson School of Engineering and Applied Sciences; prvi autor je Mustafa Abdelrahman. Mehaniku je savetovao L. Mahadevan, dok su merenja poravnanja LCE-a izvedena uz pomoć grupe Joanne Aizenberg i merenja u Brookhaven National Laboratory. Kako navodi koautor Jackson Wilt, dizajn mlaznica može u budućnosti integrisati dodatne funkcije poput kanala za tečni metal ili drugih materijala radi električnog ili hibridnog aktiviranja.
Detalji istraživanja objavljeni su u časopisu Proceedings of the National Academy of Sciences (PNAS).
Pomozite nam da budemo bolji.