Rover Perseverance je tokom testova 8. i 10. decembra 2025. izveo prvu vožnju u potpunosti planiranu generativnom veštačkom inteligencijom. AI je analizirala snimke sa Mars Reconnaissance Orbiter‑a i modele nagiba terena, identifikovala opasnosti i predložila navigacione međustažice. Nakon verifikacije na digitalnom blizancu, rover je bezbedno prešao skoro 456 m. JPL i Anthropic ističu da tehnologija otvara put za kilometarske autonomne vožnje i veći naučni prinos.
Perseverance Izveo Prvu Vožnju U Potpunosti Planiranu Generativnom Veštačkom Inteligencijom

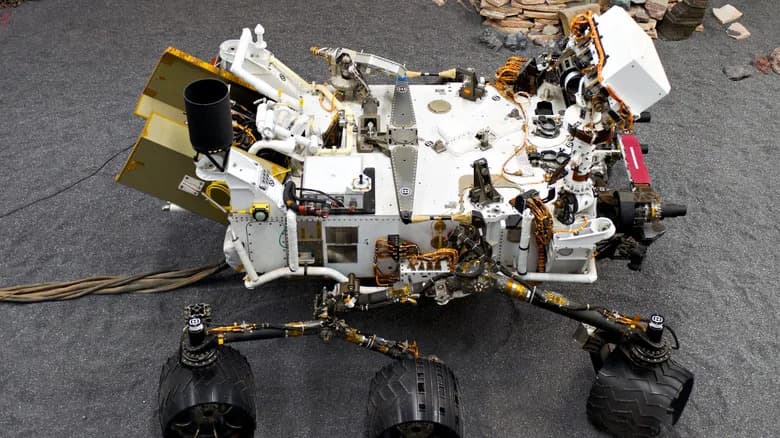
Credit: NASA/JPL-Caltech
NASA je objavila da je rover Perseverance uspešno obavio prvu vožnju po Marsu koja je u potpunosti bila planirana pomoću generativne veštačke inteligencije.
Šta je urađeno
Demonstracija izvedena 8. i 10. decembra 2025. pokazala je da AI može bez ručne intervencije bezbedno planirati rute kroz neravan Marsov teren. Time se automatizuje radno intenzivan proces koji su dosad ručno obavljali timovi operatera na Zemlji.
Kako je AI planirala rutu
Modeli su analizirali iste ulazne podatke koje koriste ljudski planeri: slike sa orbitera (Mars Reconnaissance Orbiter) i digitalne modele nagiba terena. Na osnovu toga AI je identifikovala rizike — stene, strme kosine i polja krupnih blokova — i predložila niz navigacionih međustažica (waypoint‑a) koje rover treba da dostigne.
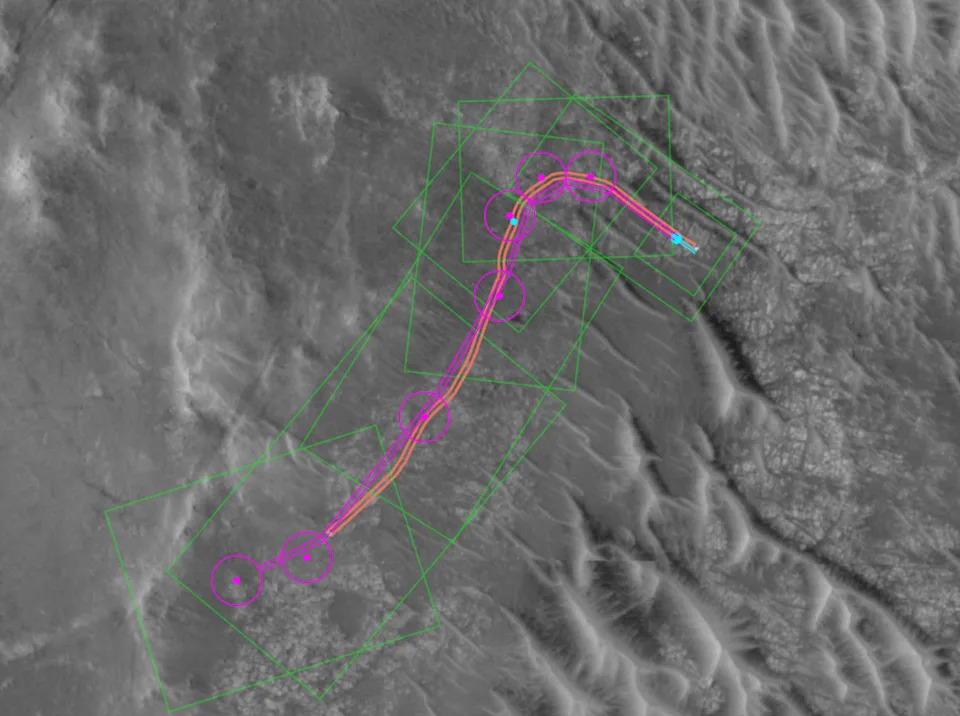
This annotated orbital image depicts the AI-planned (depicted in magenta) and actual (orange) routes the Perseverance Mars rover took during its Dec. 10, 2025, drive at Jezero Crater. The drive was the second of two demonstrations showing that generative AI could be incorporated into rover route planning. | Credit: NASA/JPL-Caltech/UofA
Saradnja i bezbednost
Test su vodili inženjeri iz Jet Propulsion Laboratory (JPL) u Kaliforniji, u saradnji sa kompanijom Anthropic, koja je obezbedila Claude AI modele. Pre slanja komandi tim je opsežno verifikovao planove koristeći detaljan digitalni blizanac Perseverancea kako bi potvrdio da su manevri bezbedni za izvršenje.
Tokom dve probne vožnje rover je prešao skoro 1.500 stopa (oko 456 metara). Na snimcima vožnje duž ivice kratera Jezero, međustažice se prikazuju kao plavi krugovi, svetloplave linije prate tragove točkova, a crne linije pokazuju alternativne opcije koje je rover procenjivao.
„Ova demonstracija pokazuje koliko su naše mogućnosti napredovale i proširuje način na koji ćemo istraživati druge svetove“, izjavio je predstavnik NASA‑e.
Zašto je ovo važno
Zbog velike udaljenosti između Zemlje i Marsa (u proseku oko 225 miliona kilometara), komunikacija u realnom vremenu nije moguća. Automatizacija planiranja omogućava roverima da izvode duže i složenije vožnje uz manje opterećenje operatera i veći naučni prinos — uključujući brzo uočavanje zanimljivih ciljeva u ogromnim skupovima snimaka.
Gde dalje? Inženjeri očekuju da će generativna AI i drugi pametni alati pomoći u planiranju kilometarskih autonomnih vožnji, ali naglašavaju da će se takve tehnologije primenjivati postepeno i uz stroga testiranja.
Pomozite nam da budemo bolji.