Nova studija pokazuje da ljudski vrhovi prstiju mogu da osećaju čvrste predmete zakopane u suvom pesku pre direktnog kontakta, putem pritisnih talasa kroz zrna. Eksperiment sa 12 volontera (216 pokušaja) zabeležio je 79 detekcija bez dodira i statistički značajne rezultate (d’ = 1.1973). robotski prst sa LSTM modelima postigao je veću preciznost, ali i veću sklonost lažnim alarmima pri širim pragovima, što sugeriše praktične primene u arheologiji, spasavanju i planetarnim misijama.
Prst Koji 'Čita' Pesak: Ljudi Imaju Skriveno "Sedmo Čulo"

A new study finds people can detect buried objects through dry sand before contact, revealing an overlooked extension of the human sense of touch. (CREDIT: Shutterstock)
Novo istraživanje sa Queen Mary University of London i University College London otkriva da ljudski vrhovi prstiju mogu da detektuju čvrste predmete zakopane u suvom pesku pre nego što dođe do direktnog kontakta. Fenomen se objašnjava pritisnim talasima koji se prostiru kroz zrna peska i stižu ispred tačke fizičkog dodira.
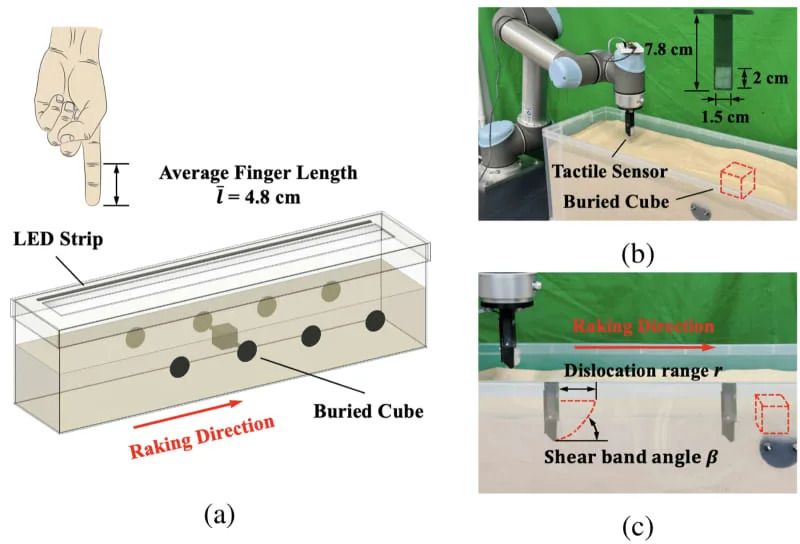
Experimental setup for detecting touch in granular materials. (CREDIT: IEEE Xplore)
Kako je eksperiment izveden
Tim je uključio 12 volontera (uzrast 18–26) koji su provlačili kažiprst kroz pesak unutar zatvorene kutije, vođeni trepćućom trakom LED dioda brzinom od 2 cm/s. Duž više od metra postavljenog kanala, ponekad je bio zakopan plastični kocka od 5 cm. Pre svakog pokušaja učesnici su prethodno dotakli kocku kako bi zadržali istu dubinu prsta (u proseku ~4,8 cm).

Shorebirds such as sandpipers, lesser yellowlegs and plovers hunt by pressing their bills into wet sand, detecting buried prey through tiny pressure shifts without ever seeing what they are after. (CREDIT: Russ / Wikimedia / CC BY-SA 4.0),
Rezultati kod ljudi
Od 216 pokušaja, učesnici su bez direktnog dodira detektovali predmet 79 puta, detekcije na dodir su bile 35, zabeleženo je 30 lažno-pozitivnih odgovora, a u 58 slučajeva pravilno su prijavili odsustvo predmeta. Analiza po teoriji detekcije signala dala je prosečnu osetljivost d’ = 1.1973 (značajno iznad slučajnosti) i skor pristrasnosti c = -0.112, što pokazuje da ispitanici nisu nasumično odgovarali potvrđujuće. Većina detekcija dogodila se oko 2,7 cm pre nego što je prst stigao do objekta.
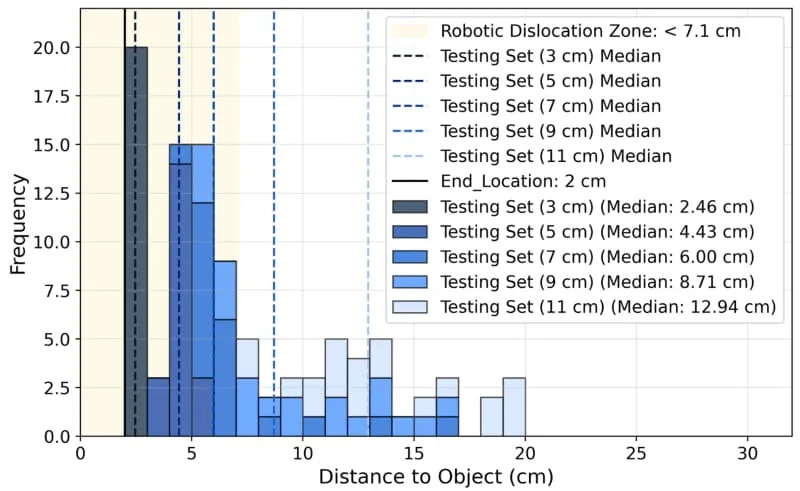
Histogram showing how far each of five LSTM models was from the object when it first detected it during the robotic experiment (20 trials with the object buried). (CREDIT: IEEE Xplore)
Robotski prst i mašinsko učenje
Istraživači su napravili robotski prst (taktilni vrh montiran na UR5 ruku) sa četiri senzora sila u tri pravca i odradili 120 pokušaja (20 bez predmeta). Podaci su obrađivani pomoću pet LSTM modela, svaki sa različitim pragom ranog poziva (3–11 cm). Pri najnižem pragu robot je detektovao predmet u svim relevantnim pokušajima i izbegao lažne uzbune u 90% slučajeva, dostižući preciznost od 91% — bolju od većine pojedinačnih ljudskih rezultata.
Domet vs. pouzdanost
Fizika zrna predviđa teoretski maksimum detekcije od oko 6,9 cm; ljudska izvedba bila je ispod te granice, što je očekivano zbog prirodne nestabilnosti kretanja prsta kroz zrna. Robot je mogao da poveća domet pri višim pragovima, ali je to dovodilo do pada preciznosti (pri najužem pragovanju preciznost je pala i do 0% jer je šum tumačen kao signal). Medijani distanci detekcije: 2,46 cm (najniži prag), 4,43 cm (prag 5 cm) i do 12,94 cm (širi prag).
Zašto su rezultati važni
Studija otvara praktične primene: arheologija (identifikacija zakopanih predmeta pre iskopavanja), potraga i spasavanje (detekcija podrušenih objekata ili ljudi kroz ruševine), te planetarna istraživanja (navigacija i otkrivanje objekata u prašnjavim ili niskovidnim uslovima). Takođe, istraživanje menja shvatanje dodira: percepcija nije ograničena samo na tačku kontakta već može uključivati i signale koji dolaze iznutra materijala kroz koji se krećemo.
„Ovo menja naše poimanje perceptualnog sveta,“ rekla je Elisabetta Versace (Queen Mary University of London), opisujući čulo kao ono koje proširuje svest izvan direktnog kontakta.
Detalji istraživanja dostupni su u IEEE Xplore. Originalna priča objavljena je u The Brighter Side of News.
Pomozite nam da budemo bolji.